연구개발(R&D)
임베디드 비전과 인공지능 기술을 다양한 산업과 응용에 접목하고 있습니다.
임베디드 비전
다양한 임베디드 비전 플랫폼을 개발합니다.
고객가치(Value for Customer)
[전송 네트워크 대역폭이 크게 감소함(IoT 환경에 적합)]
[센싱/처리/분석/제어 독자업무수행(엣지 컴퓨팅 구현)]
[자율이동플랫폼의 3D 공간인식에 적합(모빌리티 수용)]
[사람과 기계간 상호 인터페이스에 활용(유용한 HMI 도구)]
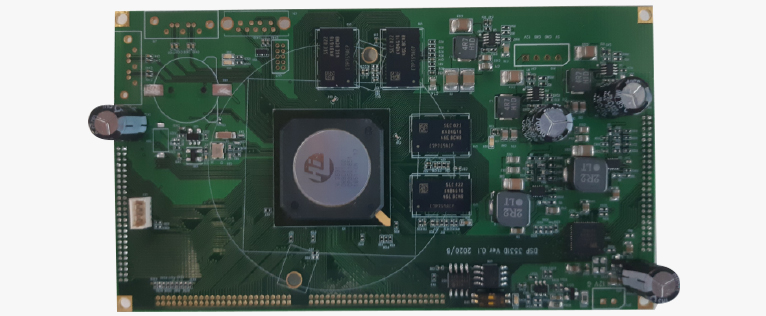
1. 임베디드 AI
영상 AI 을 Edge 모듈에서 구현하고 있습니다.
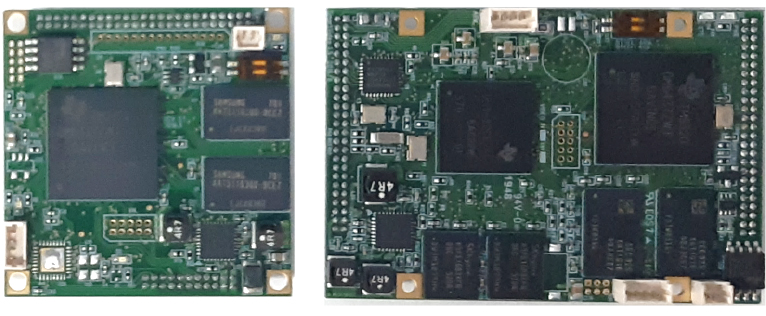
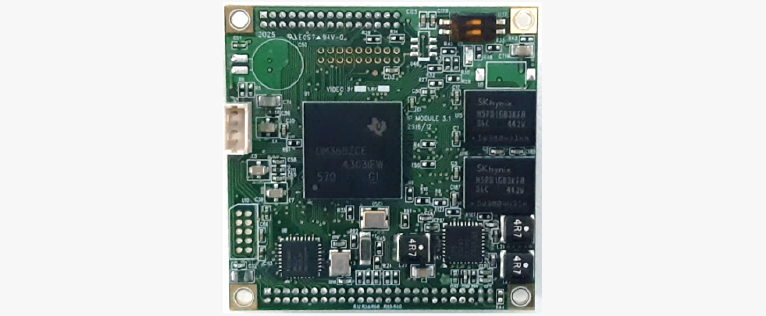
AI@ EDGE 모듈
H.264 + AI Module
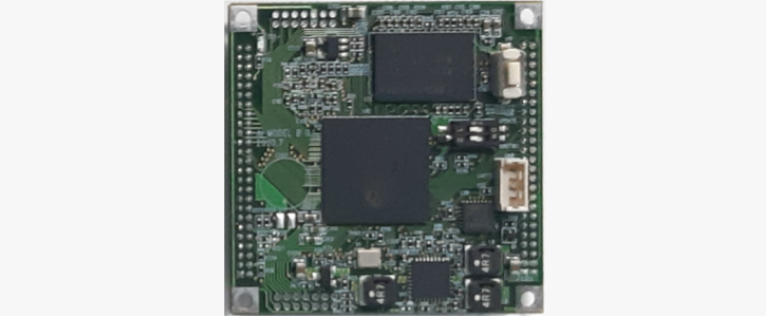
H.265 + AI Module
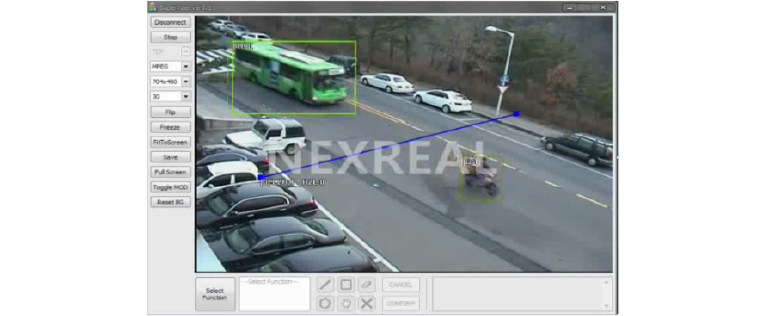
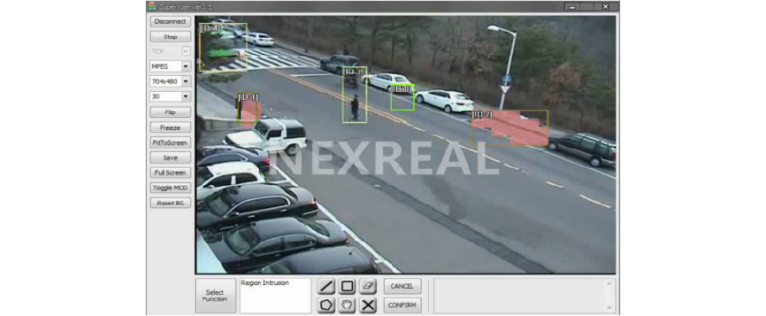
APPLICATION
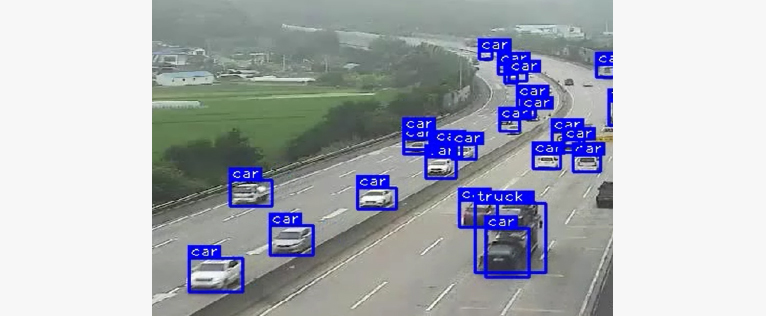
차량 탐지
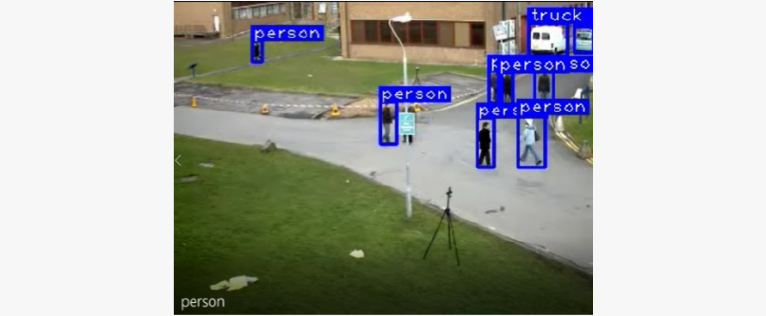
사람 탐지
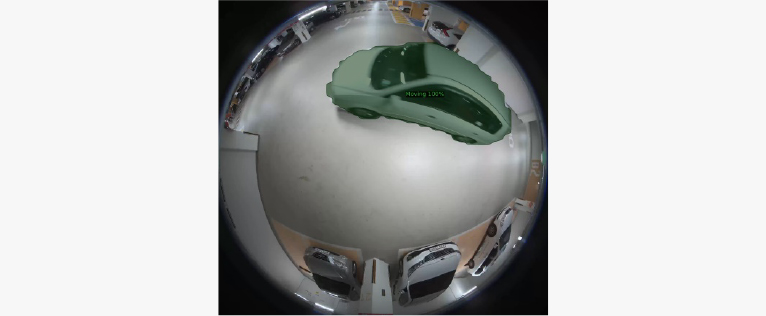
주차장 차량 글로벌 트랙킹
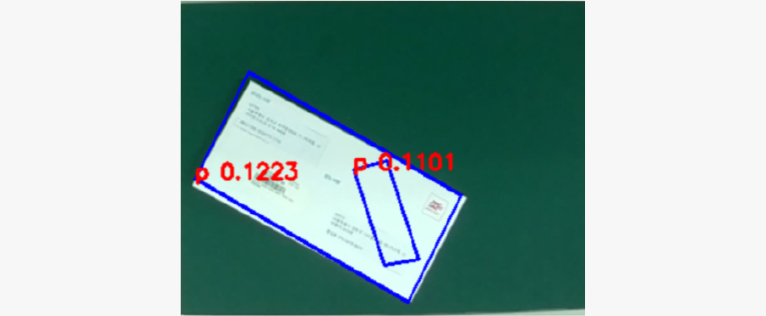
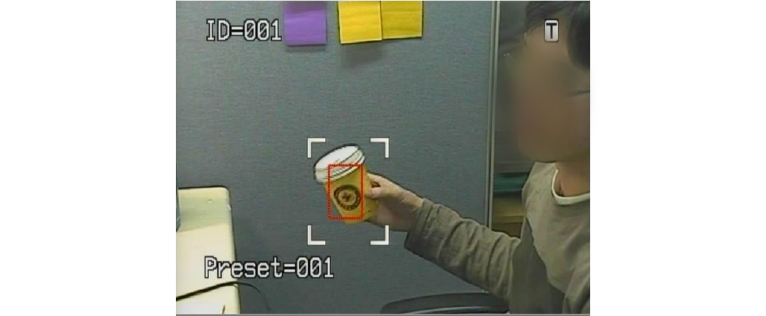
우편물 탐지
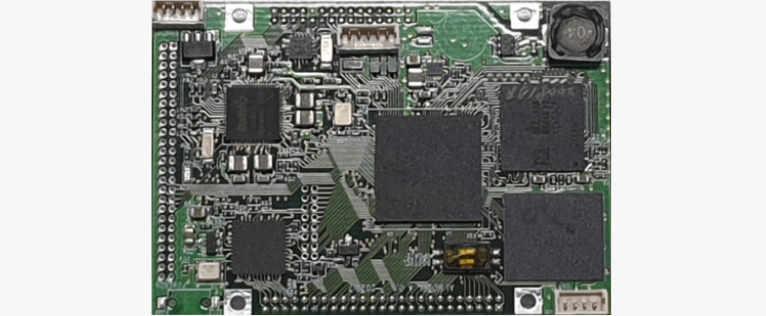
2. 임베디드 비전
다양한 영상처리 알고리즘을 DSP에 최적화하여 구현하고 있습니다.
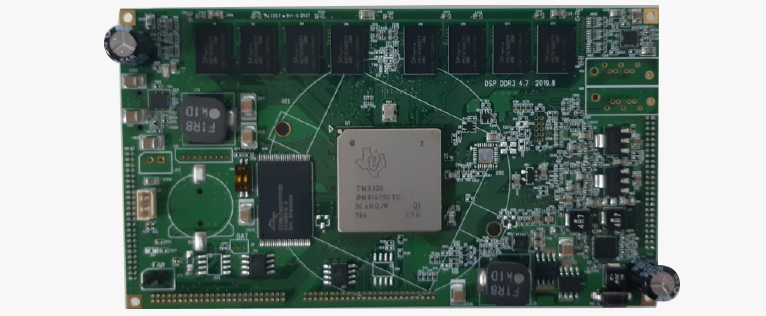
DSP 모듈
TI DAVINCI DSP,
TDA2x + TDA3x, 8Ch HD 영상처리
APPLICATION
고정카메라 영상 분석
객체 카운팅
객체 사라짐
이동카메라(PTZ) 영상 트랙킹
PTZ 트랙킹

PTZ 트랙킹
이동카메라 이동 물체 탐지

서울대 인지지능연구실과 협업으로
이동카메라에서 이동물체 탐지 알고리즘을
DSP C66x+ 코어에 실시간 구현
-
관련논문, "Robust and Fast Moving Object Detection in a Non-Stationary Camera via Foreground Probability based Sampling", IEEE International Conference on Image Processing (ICIP), 2015
스테레오 영상 매칭
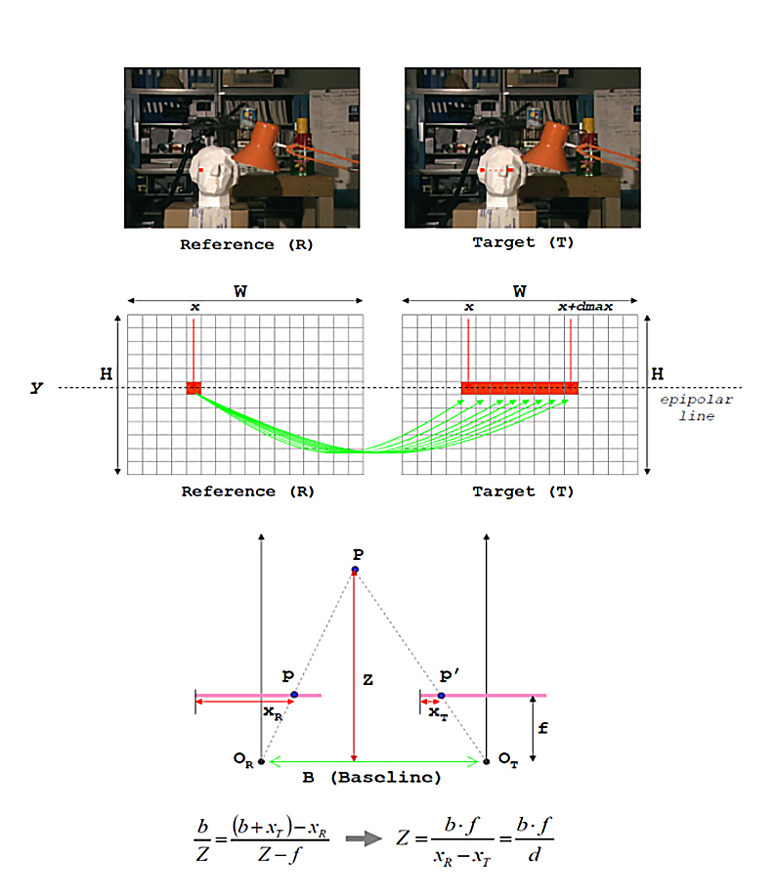
정렬 된 스테레오 이미지에서 대응점 검색
Semi-Global Block matching 기법 활용
- Stage 1: 픽셀별 Windowed SAD 코스트 계산
- Stage 2: 8방향의 Dynamic Optimization
노이즈 제거
- median 필터링 적용
- Speckle Point 필터링 적용
측정범위 필터링
- 카메라가 설치된 높이부터 0.5m 까지 영역 제거
- 바닥면부터 0.5m 까지 영역 제어
3차원 깊이 정보 계산
- 스테레오 매칭으로 계산된 Disparity Map을
캘리브레이션 단계에서 측정된 초점거리,
하드웨어의 베이스라인 길이를 이용하여
카메라로 부터 물체까지의 거리로 환산

스테레오 피플 카운팅(그림자 제거 효과)
멀티모달 영상처리
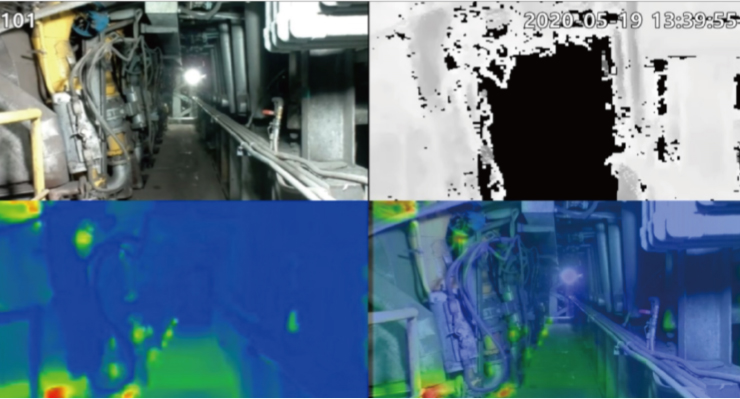
· RGB/TOF/열화상 정합
·열원탐지
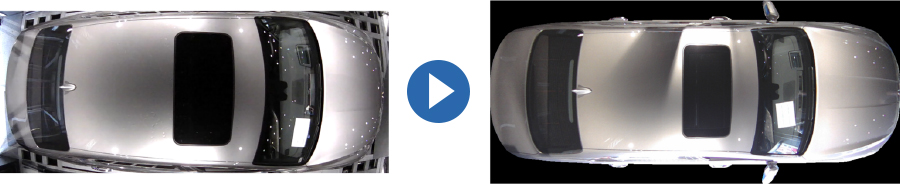
멀티 채널 영상 파노라마 영상 합성 및 IR 영상 합성

영상 왜곡 보정
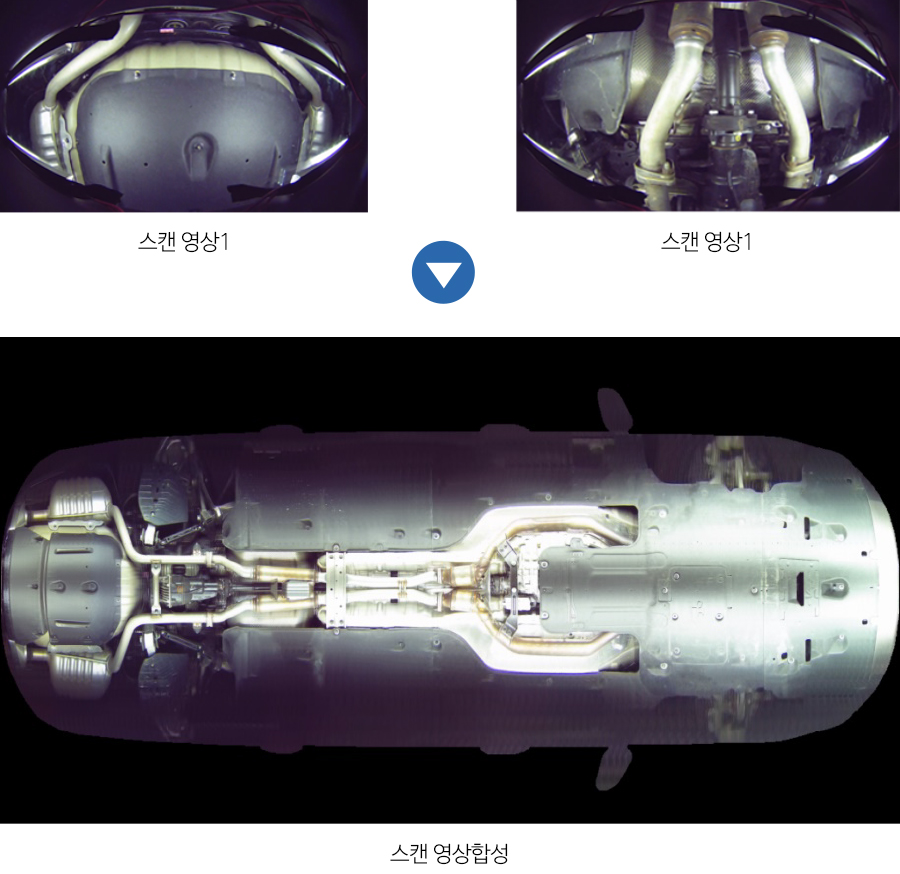
차량 하부 스캔 영상 합성
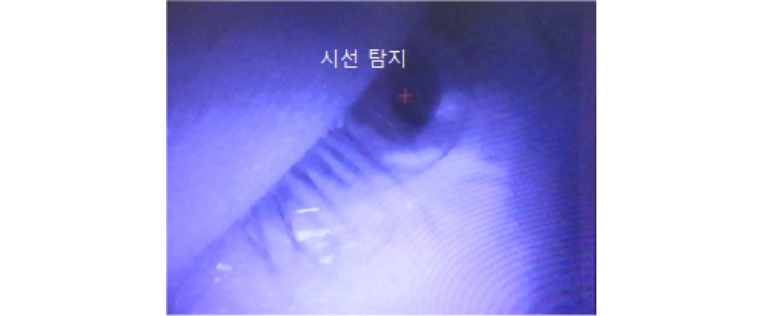
시선 감지 추적
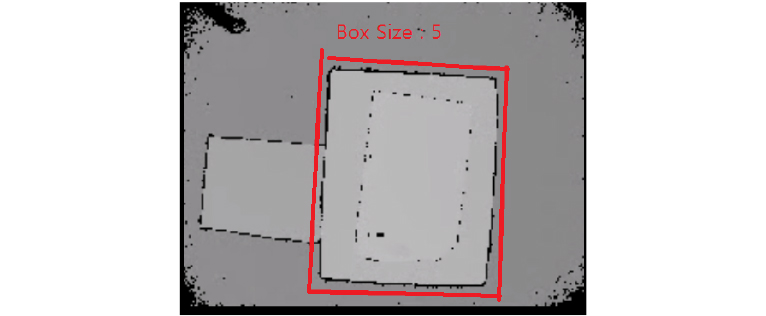
3D센서를 이용한 상자 부피 측정
3. 영상 압축, 네트워크 솔루션
영상 압축, 네트워크 전송 솔루션을 제공합니다.
[다채널 압축/저장/재생/전송 솔루션]
[RTSP Server/Client 구현]
[OnVIF protocol 지원]
[네트워크 암호화]
[LTE 기반 웨어러블/이동플랫폼 카메라 시스템 구현]
단일채널 영상압축모듈
H.264 1080P@30 FPS

H.264 1080P@60 FPS
멀티채널 압축 모듈
H.264 Multi Channel Transcoder